

 上一版
上一版





 缩小
缩小 全文复制
全文复制 上一篇
上一篇
文力最初想到“吸盘鱼”这个创意,大概是在10年前。
那时他还在国外读书,在研究仿生鲨鱼皮项目时,他发现,尽管鲨鱼皮的表面非常粗糙,但总有一种吸盘鱼寄生在上面,能够跟随鲨鱼的游动而游动。
这让他觉得“很好奇”。
文力没有让这种一闪而过的念头,停留在只是好奇的程度,而是深入思考、继续挖掘。他大量查询相关资料,在有限的档案里寻找这种鱼的记载,又前往博物馆,观察储存的样本,得知了这种鱼的名字——鱼。
这是一种很特别的鱼,头部生长着一种吸盘结构,能够紧紧地吸附在鲨鱼等鱼类身上,还有个有趣的别名,叫“鲨鱼吸附者”。
从鱼的吸盘上,文力看到了研究的前景。如果机器人能够模仿这种鱼的吸附能力,那么,小型机器人在作业时消耗的能量,将会极大减少。
经过几年的研究,北京航空航天大学机械工程及自动化学院仿生机器人研究团队文力课题组,真的打造出了这种“吸盘鱼”机器人。2022年5月19日,国际学术期刊《科学·机器人》发布了这一研究成果。北航机械工程及自动化学院2018级博士研究生李磊为第一作者,王思奇、张以远、宋善源为共同第一作者,文力教授为论文唯一通讯作者。
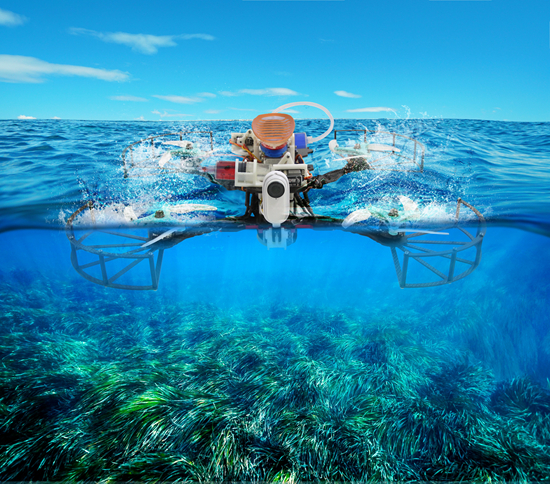
该团队研制的“吸盘鱼”仿生机器人,不但能在水下吸附,还能飞到空中,进行跨介质的吸附。
在研究的最初阶段,让课题组感到为难的第一件事,是上哪儿去弄鱼样本。没有鱼,研究团队就很难搞清楚它的结构究竟是什么。
“上哪能够捕捉一条活的,对吧?”文力开玩笑地说。
他告诉中青报·中青网记者,这个项目的研究,对他来说就是一个从无到有的过程,“前人没做过”,一切都得从0开始摸索。他拿到的第一条活的鱼,是请海边的渔民帮忙捕捞的。课题组还咨询了很多潜水爱好者,通过各种方式去收集这种鱼。
后来他的研究渐渐有了规模,能够在实验室里专门养这种鱼,观测它的运动模式,研究它的骨骼结构,弄明白它的软组织是怎么形成的,结构大概是什么尺度,等等。
这是一个“比较漫长的过程”。用文力的话说,团队最大的障碍其实是,他们的研究对象是机器人而不是生物,因此在理解鱼的生理结构方面,花了很长一段时间。
下一步就是如何仿生,如何精确地将这种结构研制出来。
文力提到,团队用的方法是3D打印、微激光雕刻等技术,以及设置软件驱动。这一步,就是这个机器人团队最擅长的事了。
吸盘鱼机器人就此问世,它可以像鱼一样,吸附在多种物体表面上,吸附力也非常大。
早在2017年,文力课题组就已经在《科学·机器人》上发表封面文章讲述这一研究过程。那时,机器人只能游动吸附,是一个阶段性的成果,还存在两大问题。第一个问题是机器人有线缆,行动范围会被限制,电源之类的东西都在水面上。第二个就是吸盘,那时的吸盘是利用多种材料3D打印出来的,因此有点硬,很难吸附在粗糙或者有曲率的表面上,也很难吸附在不完整的、破损的表面上。
为了解决这些问题,文力课题组一方面继续学习生物,研究鱼的吸盘结构到底是怎么回事,另一方面也在进一步考虑机器人如何才能摆脱线缆的控制。
文力甚至觉得,这样的机器人只在水下活动是远远不够的,他希望这个机器人,可以在空气中完成同样的功能,“最好还能够快速‘跨界’”。
又经过数年的努力,他们再次做到了。
“鱼只能做到水下的吸附,我们的研究相当于拓展了仿生的能力,超越了自然,研制出在不同的介质中也能实现吸附作用的机器人。”文力对中青报·中青网记者说。
在2022年发表的《科学·机器人》论文中,他们所描述的新的“吸盘鱼”机器人,不但能够快速跨越介质,还可以在接触可吸附表面一半时,就能够吸得很牢。文力向记者举了个例子,如果吸附表面的中间部分破损,有多个洞,这款仿生机器人依然能牢牢吸附在上面。此外,湿滑、黏稠的表面,机器人也能够吸附。
据他介绍,这种仿生机器人,可以在“多地形观测、多介质作业、多环境探查”等工作中广泛应用,比如野外监测、海洋生物调查等等。
在这些年的研发过程中,文力发现,自己团队中越年轻的学生,越会提一些比较天马行空的想法。他认为,可能是因为学生们在思维上没有太多牵绊,很多时候可以“不按套路出牌”。其中有一些,他觉得可以执行,但也有一些可行性不强,或者说从科学原理上还没有完全验证过的。
“但是我非常鼓励学生们去提(自己的想法),比不说话要强。”文力说。
这个项目已经足够科幻,如果继续往前走的话,他们还有很多设想,有些甚至显得有些“疯狂”。
“目前的机器人潜水深度还较浅,空中飞得也不是很高,我们希望机器人能够拥有更极端的跨界能力,例如:从地球最深处,跨越到太空,在空间环境下作业!”他说。
文力承认这“非常有挑战性”,但也“非常有意思”。
中青报·中青网记者 张渺




